金年会,金年会体育,金年会体育app,金年会体育官方网站,金年会注册,金年会最新入口,金年会APP

一般意义上讲机头可分为机械部分和电器部分,按其各部分性能,又可分为动
力部分,传动部分,和操纵控制部分。本设计重点讲机头的一些机械方面的知
学、航空、交通、农业以及其他各种工业中,电动机被广泛地应用着。随
着工业自动化程度不断提高,需要采用各种各样的控制电机作为自动化系
统的元件,人造卫星的自动控制系统中,电机也是不可缺少的。此外在国
防、文教、医疗及日常生活中(现代化的家电工业中)电动机也愈来愈广泛
力定律等基础上的。当磁极沿顺时针方向旋转,磁极的磁力线切割转子导
条,导条中就感应出电动势。电动势的方向由右手定则来确定。因为运动
是相对的,假如磁极不动,转子导条沿逆时针方向旋转,则导条中同样也
能感应出电动势来。在电动势的作用下,闭合的导条中就产生电流。该电
流与旋转磁极的磁场相互作用,而使转子导条受到电磁力(安培力),电磁
力的方向可用左手定则确定。由电磁力进而产生电磁转矩,转子就转动起
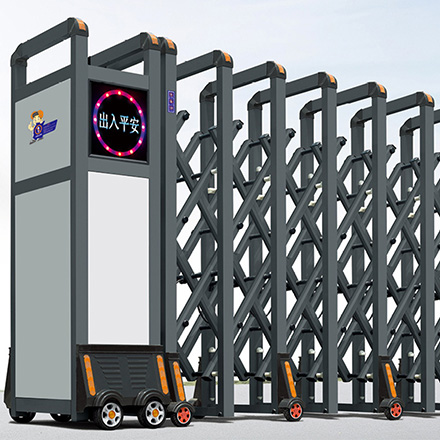
个自动伸缩门的基础部分。我们知道移动机构运动方式有轮式、履带式和步行
方式。轮式和履带式适于条件较好的路面,而步行方式则适于条件较差的路面。
为了适应各种路面的情况,可采用轮、腿、履带并用。本课题中的设计思想是
作为在路面环境较好的场合中工作使用,所以采用轮式结构。其机械结构如下
轮式移动机构一般有三轮、四轮或六轮,其转向装置的结构通常有两种方
1)铰轴转向式:转向轮(万向轮)装在转向铰轴上,转向电机通过减速器和机
2)差速转向式:在小车的左右轮上分别装上两个独立的驱动电机,通过控制
左右轮的速度比来实现车体的转向。在这种情况下,非驱动轮应为自由轮。
1)三轮铰轴转向式:如图3-2(a)所示,轮l为铰轴转向轮,它同时也可以作
2)z轮差动转向式:如图3-2(b)所示,轮1为随动轮,它可以自由转动,轮
3)四轮铰轴转向式:如图3-2(c)所示,轮1和轮2为转向轮,它们之问有
4)四轮差动转向式:如图3-2(d)所示,轮1和轮2为自由轮,轮3和轮4
中,移动小车有一定的总重量,且要移动平稳,所以采用四轮就能满足要求。
铰轴转向式控制简单,但精度不是太高。差动转向式控制复杂,但精度较高。
为了以后的轨迹规划打下一个良好的基础,其运动和转向的精度应该高,综
驱动电机采用直流力矩电机,这是因为直流力矩电机具有优良的速度控
(41电机的负载特性硬,有较大的过载能力,确保运行速度不受负载冲击
车架要求从强度和刚度上满足车体运行和加速时的要求,同时又不能太
重,因而采用硬铝作为车架的材料。装有与驱动直接有关或重量较大的部
件(如蓄电池)以利于机械结构设计和降低车体重心,重心越低越有利于抗
电机和车轮之间采用蜗轮蜗杆传动,减速比为1:20。电机与蜗杆之间
随动轮不产生驱动力矩,它只起支撑作用,在机器人转向时它可以自由
为了实现移动小车运动状态控制,须建立四轮移动小车运动分析模型,因
电动机的输出转矩并不就是电磁转矩。因为电机本身的机械摩 擦和电枢
铁心的涡流、磁滞损耗等都要引起阻转矩,如果把电机本身的阻转 矩加
目前,在直流电动机的调速控 制中,以应用PW M调速控制方式为主。直
流电动机在一定电压下,转速与转矩成反比,若改变电压,则转速转矩 关系连
线随着电压的升降而升降,如图所示,在负载一定的时候,即转矩一定 的时候,
降低电压.对应的转速一,补:不同,从而可以实现通过改变电动机电压 的方
本课题的无轨自动伸缩门采用的控制系统提供给电动机的信号是脉宽 调
制PWM信号,所谓脉宽调制是指通过可控开关以一定的时间间隔重复地 接通
和断开,使在电动机两端间得到的电压波形 ,如图3-6所示,其电压平均 值U。
2,传递的功率大,且张紧力小,传动的效率高,一般达到0.95-0.98;
一般的说。只要有中心距。还有齿轮的模数,就可以从标准件中选出来。
Copyright © 2018-2025 金年会- 金年会体育- 金年会官网- 金年会APP电动伸缩门有限公司 版权所有 非商用版本 备案号:
020-88888888